Propeller Damage Detection: Adapting Models to Diverse UAV Sizes
Abstract
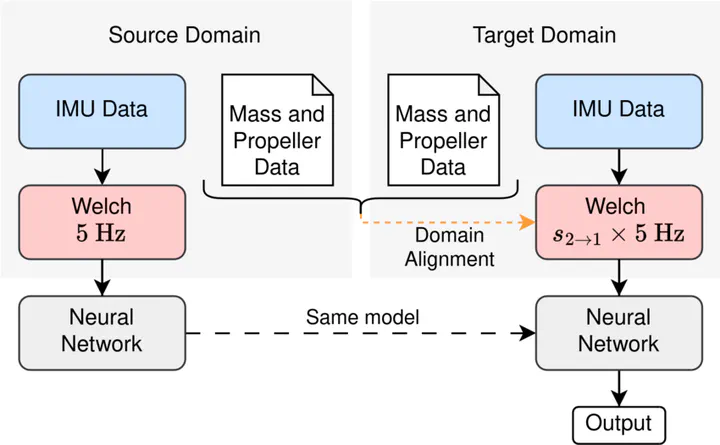
This manuscript introduces a transfer learning method for adapting propeller fault detection neural networks to different unmanned aerial vehicles (UAVs). After training a simple model for detecting if any propeller in a specific vehicle has a failure (in this case, a chipped tip), a domain adaptation based in the vehicles’ physics is performed in order to use the same model to detect failures in vehicles with different structures, weights, or motor-propeller sets. A key feature is that the detection model uses only inertial sensors that are standard in commercial UAVs, making it broadly applicable without the need for additional hardware.
Type
Publication
ICUAS 2025