Dopamine-Modulated Spiking Central Pattern Generators for Gait Selection in Quadruped Robots
2025-12-02· ,,·
0 min read
,,·
0 min read
Gabriel Torre
Juan Giribet
Sergio Lew
Abstract
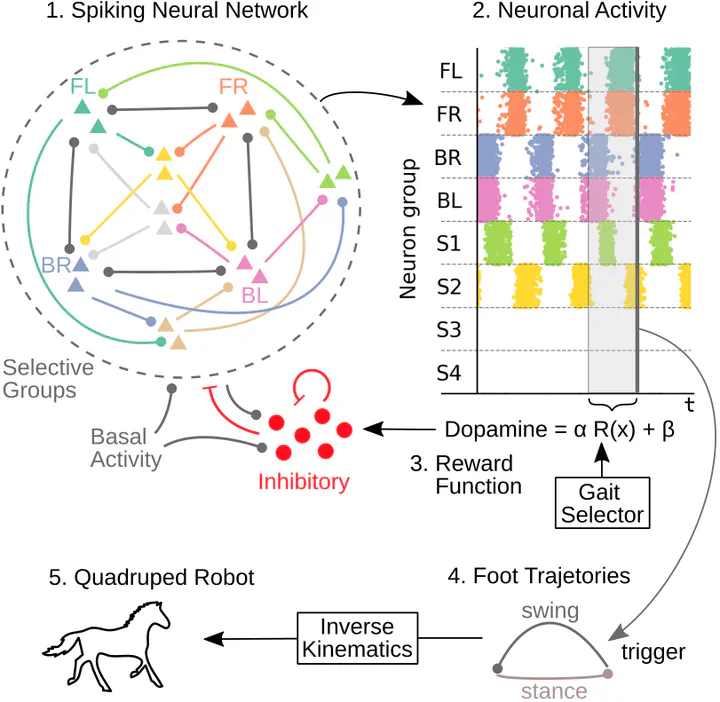
We present a biologically-inspired gait control system for quadruped robots based on spiking neural networks (SNNs) functioning as central pattern generators (CPGs). By modulating dopamine, the same neural structure can produce different gaits such as trot and bound. A reward-driven mechanism adjusts the neuromodulation to select the desired gait, achieving reliable transitions between attractor states. The neural dynamics are validated in simulation, and the controller is directly deployed on a physical quadruped robot. Our results show that dopamine modulation enables robust and adaptive gait switching through low-dimensional control, with stable performance on real hardware.
Type
Publication
ICAR 2025